Supplementary Report¶
(Thur Mar 19) After taking a rest, I have come to understand what “done” means for me, and with the one-week extension, I am continuing this journey.
1. Local Docker Setup¶
STEP 1. Install Docker and Start Docker Desktop
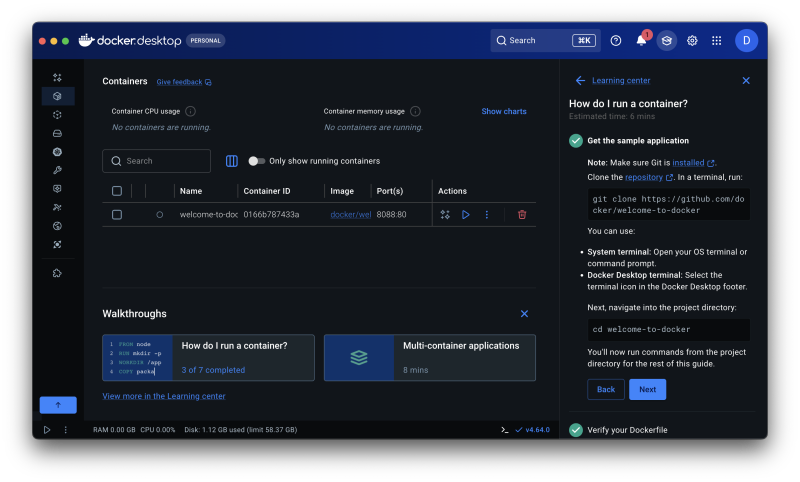
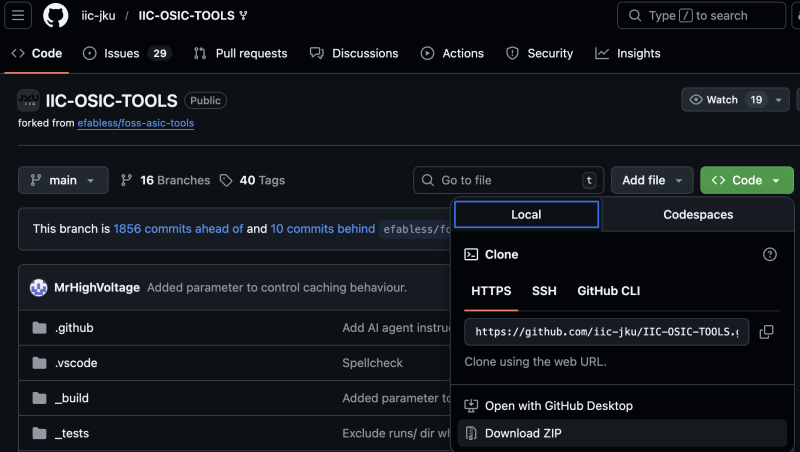
STEP 2. Clone or download the Repository
Open your terminal.
cd ~/Downloads/IIC-OSIC-TOOLS-
then press tab on your keyboard to auto complete the folder name and press enter.
Step 3. Start the Container
After in the folder. ./start_vnc.sh

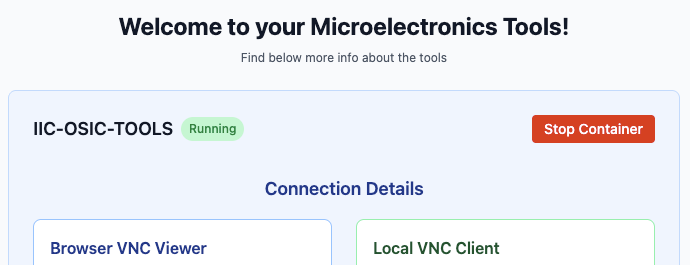
But, IIC-OSIC-TOOLS did not start. Inquiry Via Mattermost app, The answer was “Do you have 25GB of space available on your MAC?”
2 . Generate GDS and review in Klayout¶
STEP 1. I decided to use Local VNC and restart the Container via Tools Dashboard (Not just quit & restart TigerVNC connect) –> Finally, I have understood the meaning of IIC-OSIC-TOOLS Running
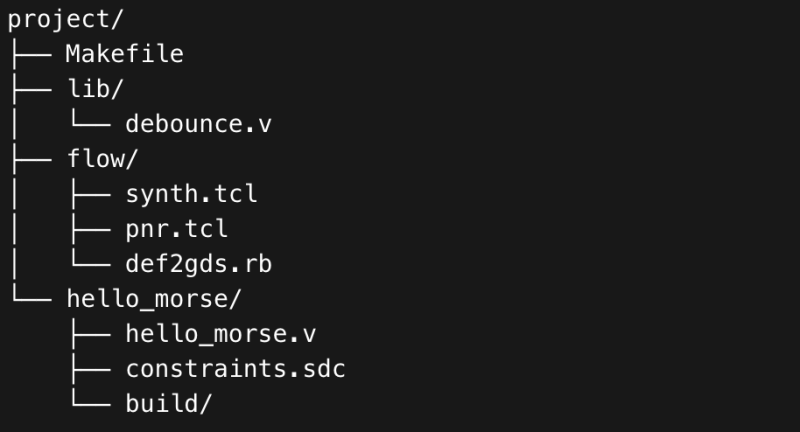
STEP 2. Place lib/, flow/ , Makefile in /foss/designs/project/
STEP 3. Fix the code of Makefile and then Run.
3. Packaging and board design¶
4. My Presentation¶

5. Fix the code and then Upload the Final delivery¶
-
I fixed the code of
hello_morse_tb.v,hello_morse.vvp,hello_morse_tb.vcd -
My Final Code Set is here coloring_wing.zip
// ============================================================================
// Hello Morse Testbench
// ============================================================================
//
// This testbench verifies the Morse code beacon by:
// 1. Capturing the serial data transmitted to the WS2812 LED strip
// 2. Decoding the WS2812 waveform to recover LED color values
// 3. Detecting Morse dots, dashes, and inter-symbol / inter-character gaps
// 4. Monitoring the buzzer output to verify 600 Hz tone generation during Morse activity
// 5. Confirming synchronization between the LED indication and buzzer signal
// 6. Dumping simulation waveforms to a .vcd file for analysis in GTKWave
//
// MORSE TIMING RECAP:
// - Dot = 1 unit (LEDs on)
// - Dash = 3 units (LEDs on)
// - Gap between symbols = 1 unit (LEDs off)
// - Gap between letters = 3 units (LEDs off)
// - Gap between words = 7 units (LEDs off)
//
// HOW TO RUN:
// iverilog -g2012 -o hello_morse.vvp hello_morse.v hello_morse_tb.v debounce.v
// vvp hello_morse.vvp
// gtkwave hello_morse_tb.vcd
//
// ============================================================================
`timescale 1ns/1ps
module hello_morse_tb;
// ========================================================================
// Testbench Signals
// ========================================================================
reg clk;
reg rst_n;
reg btn_color;
wire led_data;
wire buzzer_pwm;
// ========================================================================
// VCD Dump for GTKWave
// ========================================================================
initial begin
$dumpfile("hello_morse_tb.vcd");
$dumpvars(0, hello_morse_tb);
end
// ========================================================================
// DUT Instantiation
// ========================================================================
//
// We use 10 MHz clock for simulation.
// At 10 MHz, clock period = 100 ns.
// UNIT_TIME = 10_000_000 / 10 = 1,000,000 cycles = 100 ms per unit.
hello_morse #(
.CLK_FREQ(10_000_000), // 10 MHz simulation clock
.NUM_LEDS(8)
) dut (
.clk (clk),
.rst_n (rst_n),
.btn_color (btn_color),
.led_data (led_data),
.buzzer_pwm (buzzer_pwm)
);
// ========================================================================
// Clock Generation
// ========================================================================
initial begin
clk = 1'b0;
forever #50 clk = ~clk; // 10 MHz clock
end
// ========================================================================
// WS2812 Protocol Decoder
// ========================================================================
//
// Decodes WS2812 serial data to extract LED colors.
time rise_time;
time fall_time;
real high_time_us;
reg [23:0] rx_data;
reg [4:0] rx_bit;
integer led_count;
integer frame_count;
reg [23:0] last_color;
initial begin
rx_bit = 0;
rx_data = 24'd0;
led_count = 0;
frame_count = 0;
rise_time = 0;
fall_time = 0;
high_time_us = 0.0;
last_color = 24'h000000;
end
// Record time on rising edge
always @(posedge led_data) begin
rise_time = $time;
end
// Decode each bit on falling edge
always @(negedge led_data) begin
fall_time = $time;
high_time_us = (fall_time - rise_time) / 1000.0; // ns -> us
if (high_time_us > 0.6)
rx_data[23 - rx_bit] = 1'b1;
else
rx_data[23 - rx_bit] = 1'b0;
rx_bit = rx_bit + 1;
if (rx_bit >= 24) begin
// First LED indicates whether Morse output is ON or OFF
if (led_count == 0) begin
if ((rx_data != 24'h000000) && (last_color == 24'h000000)) begin
$display("[%0t ns] LEDs ON (G=%02h R=%02h B=%02h)",
$time, rx_data[23:16], rx_data[15:8], rx_data[7:0]);
end
else if ((rx_data == 24'h000000) && (last_color != 24'h000000)) begin
$display("[%0t ns] LEDs OFF", $time);
end
last_color = rx_data;
end
rx_bit = 0;
led_count = led_count + 1;
if (led_count >= 8) begin
led_count = 0;
frame_count = frame_count + 1;
end
end
end
// ========================================================================
// Optional Buzzer Monitor
// ========================================================================
always @(posedge buzzer_pwm) begin
$display("[%0t ns] Buzzer activity", $time);
end
// ========================================================================
// Main Test Sequence
// ========================================================================
initial begin
rst_n = 1'b0;
btn_color = 1'b0;
$display("");
$display("===========================================");
$display("Hello Morse Testbench");
$display("===========================================");
$display("Message: HELLO");
$display("Expected Morse: .... . .-.. .-.. ---");
$display("");
$display("Watching for LED on/off transitions...");
$display("(At 10 MHz sim clock, 1 unit = 100 ms)");
$display("");
// Release reset
#10_000;
rst_n = 1'b1;
// --------------------------------------------------------------------
// Watch Morse Output
// --------------------------------------------------------------------
#500_000_000; // 500 ms
// --------------------------------------------------------------------
// Test Color Change
// --------------------------------------------------------------------
$display("");
$display("Pressing color button...");
btn_color = 1'b1;
#30_000_000; // 30 ms press, long enough for debounce
btn_color = 1'b0;
// Wait for debounce and observe color change
#200_000_000;
// --------------------------------------------------------------------
// Done
// --------------------------------------------------------------------
$display("");
$display("===========================================");
$display("Test complete!");
$display("Frames captured: %0d", frame_count);
$display("===========================================");
$finish;
end
endmodule